机器人型号:库卡KR210
用(yòng)途:点焊
供应产(chǎn)品:管線(xiàn)包
波纹管内径:Φ70mm
防护件产(chǎn)地:瑞士
主要件材质(zhì):聚酰胺
KR210的性能(néng):
1.负荷负荷:210kg 附加负荷:100kg
2、二手KUKA点焊机器人本體(tǐ)工(gōng)作(zuò)范围最大作(zuò)用(yòng)范围:2700/2900mm
产(chǎn)品特点
高可(kě)靠性
比同类机型的作(zuò)业速度提高了25%。它在高的负荷下依然能(néng)够可(kě)靠作(zuò)业,同时非常易于维护。
性能(néng)好
与其家族成员一样紧凑轻巧。负载能(néng)力与作(zuò)用(yòng)范围之间的平衡使其在市场上无可(kě)替代。无论身处何处,都能(néng)发挥很(hěn)好的性能(néng)。
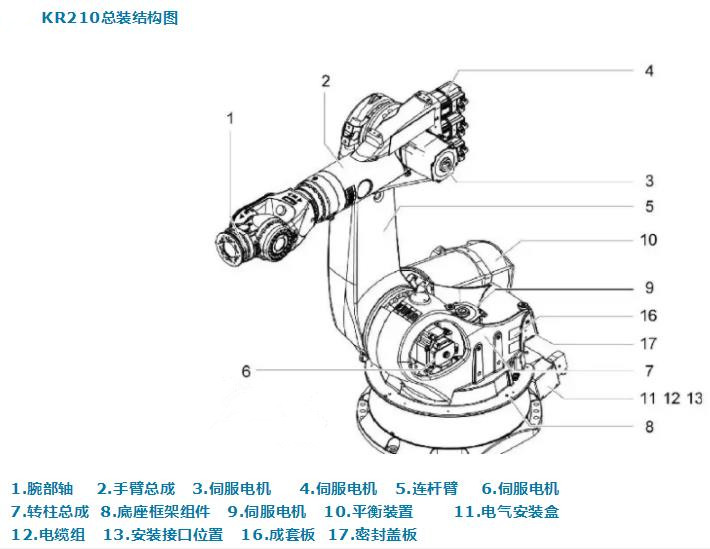
点焊机器人由机器人本體(tǐ)、计算机控制系统、示教盒和点焊焊接系统几部分(fēn)组成,由于為(wèi)了适应灵活动作(zuò)的工(gōng)作(zuò)要求,通常点焊机器人选用(yòng)关节式工(gōng)业机器人的基本设计,一般具(jù)有(yǒu)六个自由度:腰转、大臂转、小(xiǎo)臂转、腕转、腕摆及腕捻。其驱动方式有(yǒu)液压驱动和電(diàn)气驱动两种。其中(zhōng)電(diàn)气驱动具(jù)有(yǒu)保养维修简便、能(néng)耗低、速度高、精(jīng)度高、安(ān)全性好等优点,因此应用(yòng)较為(wèi)广泛。点焊机器人按照示教程序规定的动作(zuò)、顺序和参数进行点焊作(zuò)业,其过程是完全自动化的,并且具(jù)有(yǒu)与外点焊机器人专用(yòng)的点焊钳部设备通信的接口,可(kě)以通过这一接口接受上一级主控与管理(lǐ)计算机的控制命令进行工(gōng)作(zuò)。